Computational cameras
Embedded and robotic vision systems of the future will need to be flexible with very low size, weight and power characteristics. Inspired by the capabilities
of biological vision systems in nature, a novel computational camera has been developed by BVI researcher David Gibson in collaboration with Neill
Campbell and David Bull.
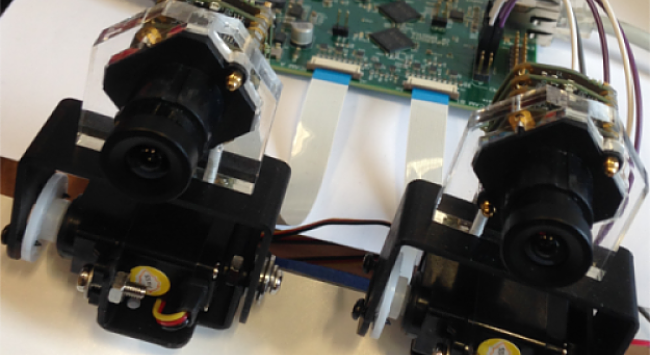
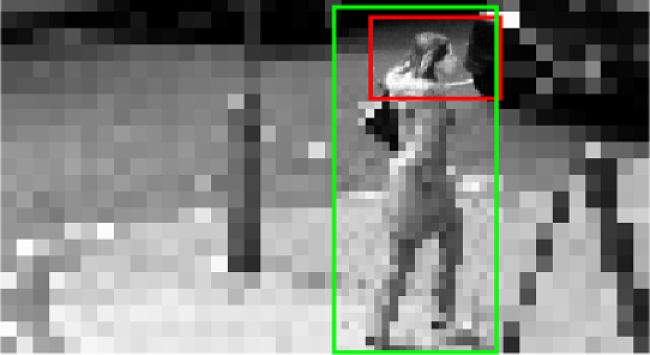
The unique close-to-sensor design supports a flexible, very low latency interface between the image sensor and a highly parallel processing architecture. In particular, the design allows region of interest (ROI) adaptation where regions of the scene that contain little or no useful information can be discarded close to the sensor, reducing the transmission bandwidth and memory requirements. Pixels or regions can be spatio-temporally sampled according to the requirements of the scene and/or the task being performed.
The system has attracted significant commercial interest world wide and is applicable to challenging areas such as visual navigation in UAVs, binocular robotic vision and in particular, as a compact surveillance camera with embedded intelligence. A highly integrated modular version of the system has been produced that also includes a gyroscope, accelerometer and an e-compass.